
I printed my original model and quickly became convinced it had a few significant design flaws. It would definitely work, but it could be much better.
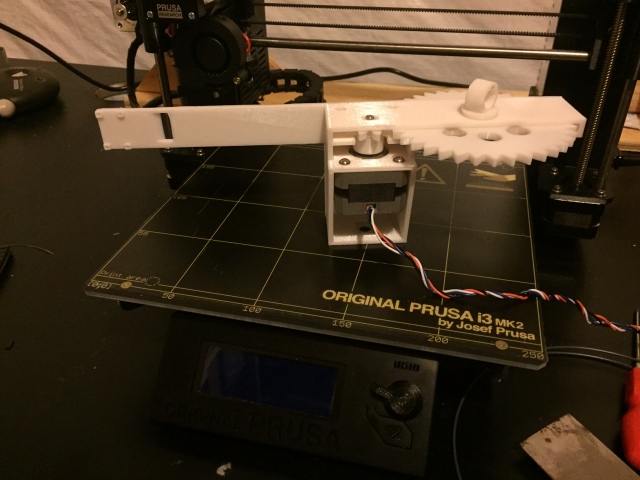
The whole point of using the gear system was to get smaller steps. The down side of this gear system is that getting it to work smoothly with minimal friction is difficult. In working out the electronics design, I realized I could use a much simpler method – microstepping! Using the stepper motor driver, I can divide the steps into smaller increments. This ability is already built in to the chip I plan to use. The only real down side is that you lose torque when you microstep. For my application, this won’t matter at all. The laser in extremely light and will be mounted with its center of mass directly over the rotation point.
The other major flaw is the flimsy arm holding the camera in place. This will stiffen when I add the raspberry pi case (which I hadn’t added yet). Taking this into mind, I came up with a much better plan.
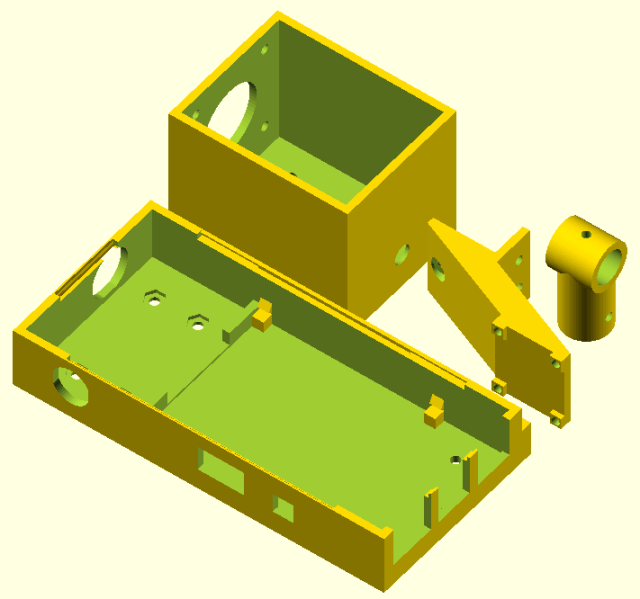
Here we have only 4 parts to print. Not shown is the pi case top, which I’ll design later. The raspberry pi case has integrated standoffs and clips to hold the pi board in place. To the left of the case is a space for the power jack and an on/off switch.
Here’s an image of the assembled system. This should give a very sturdy way to mount the entire system to a tripod.


Parts are currently printing. Hopefully I can start on the electronics assembly this week.
